خودروهای خودران چگونه کار میکنند؟
تا چند سال پیش، رانندگی بدون دخالت انسان فقط در فیلمهای علمیتخیلی دیده میشد. اما امروز، خودروهای بدون راننده وارد خیابانها شدهاند و شرکتهای بزرگی مانند Google (با پروژه Waymo)، Tesla، Uber و Baidu میلیاردها دلار برای توسعه این فناوری سرمایهگذاری کردهاند. این خودروها، بدون فرمان فیزیکی و پدال گاز یا ترمز، به کمک رایانهها، حسگرها و الگوریتمهای هوش مصنوعی هدایت میشوند.

در این مقاله، به بررسی نحوه عملکرد خودروهای خودران میپردازیم. اینکه چگونه محیط اطراف خود را درک میکنند، چگونه تصمیم میگیرند و چه فناوریهایی آنها را به این سطح از هوشمندی رساندهاند.
خودرو خودران چیست؟
خودروی خودران یا autonomous vehicle خودرویی است که توانایی حرکت در محیطهای پیچیده را بدون دخالت راننده انسانی دارد. این خودروها با استفاده از مجموعهای از حسگرها، پردازشگرها، نرمافزارهای هوش مصنوعی و سیستمهای کنترلی دقیق، وظایف راننده را انجام میدهند.
سطوح خودران بودن
بهطور رسمی، انجمن مهندسان خودرو (SAE) شش سطح برای اتوماسیون خودروها تعریف کرده است:
- سطح ۰: بدون هیچ اتوماسیونی. راننده کنترل کامل دارد.
- سطح ۱: کمک جزئی (مثلاً کروز کنترل یا هشدار خروج از خط).
- سطح ۲: کمک راننده پیشرفته؛ خودرو میتواند فرمان دهد و ترمز کند، اما حضور راننده الزامی است.
- سطح ۳: خودرو میتواند شرایط خاصی را بدون نظارت انسان مدیریت کند، اما در صورت لزوم راننده باید وارد عمل شود.
- سطح ۴: خودران کامل در محیطهایی از پیش تعریفشده (مثلاً شهر خاص یا آبوهوای مناسب).
- سطح ۵: خودران واقعی؛ در همه شرایط و بدون نیاز به راننده انسانی.
امروزه بیشتر خودروهای موجود در بازار، در سطح ۲ یا نهایتاً ۳ قرار دارند. پروژههای پیشرفته مانند Waymo یا Cruise نیز در حال آزمایش سطح ۴ هستند.
اجزای اصلی خودروهای خودران
حسگرها و دوربینها – چشمان خودرو
برای اینکه خودرو بتواند درک دقیقی از محیط داشته باشد، از چندین نوع حسگر استفاده میشود:
LiDAR (تشخیص نور و فاصله):
-با ارسال پالسهای لیزری و سنجش بازتاب آنها، یک تصویر سهبعدی از محیط تولید میکند.
-دقت بالایی دارد، اما هزینهبر است و در مه یا باران کاهش کارایی دارد.
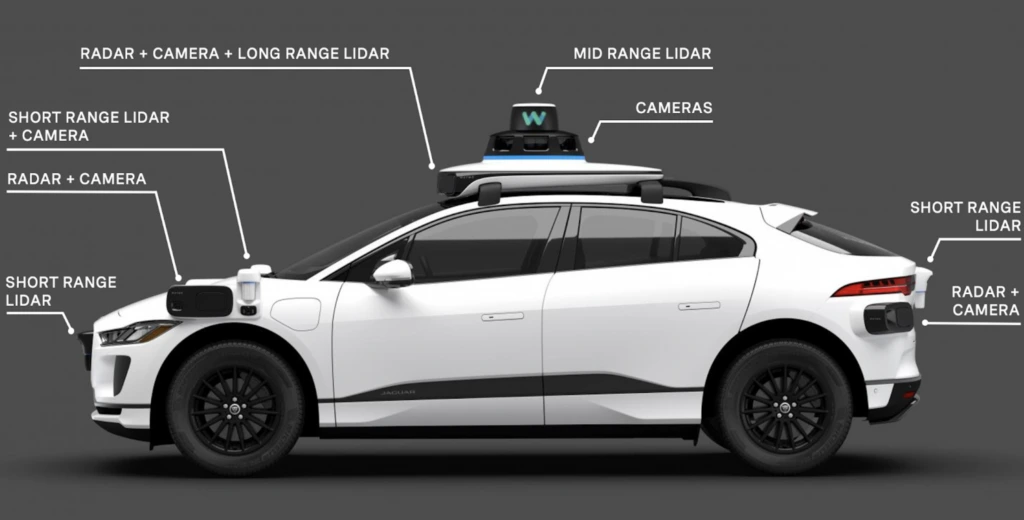
دوربینها:
-برای دیدن تابلوها، خطکشیها، رنگ چراغ راهنمایی، عابر پیاده و وسایل نقلیه اطراف استفاده میشود.
-خودرو معمولاً از چند دوربین در جلو، عقب و طرفین بهره میبرد.
رادار (Radar):
– با امواج رادیویی فاصله و سرعت اجسام را تشخیص میدهد.
– در شرایط نامساعد جوی بهتر از دوربین عمل میکند.
GPS و نقشههای HD:
-موقعیتیابی دقیق و پیشبینی موانع براساس نقشههای با جزئیات بالا.
سنسورهای فراصوت و IMU:
-برای پارک خودکار، تشخیص موانع نزدیک و اندازهگیری شتاب و زاویه خودرو.
پردازش و درک محیط
همه دادههای حسگرها باید با سرعت بسیار بالا تحلیل شوند. خودرو باید بفهمد کجا قرار دارد، چه چیزهایی اطراف آن هستند و آن اشیاء چه رفتاری دارند.
برای این کار، الگوریتمهای بینایی ماشین (Computer Vision) و یادگیری عمیق استفاده میشوند. مثلاً:
- تشخیص عابر پیاده
- تشخیص حرکت یک دوچرخهسوار
- شناسایی خطوط خیابان حتی اگر محو شده باشند
در این مرحله، خودرو به کمک نقشههای از پیش تهیهشده و دادههای حسگرها، موقعیت دقیق خود را (با خطای کمتر از چند سانتیمتر) تعیین میکند.
برنامهریزی مسیر و تصمیمگیری (Planning & Decision Making)
حالا که خودرو میداند در کجا قرار دارد و چه چیزهایی اطرافش هستند، باید تصمیم بگیرد:
- چه زمانی بپیچد؟
- با چه سرعتی حرکت کند؟
- در چه موقعی ترمز کند؟
- از کدام مسیر برود؟
برای این تصمیمگیریها، از هوش مصنوعی استفاده میشود. الگوریتمهای یادگیری تقویتی (Reinforcement Learning)، شبکههای عصبی، و سیستمهای تصمیمگیری پیچیده بر اساس میلیاردها کیلومتر رانندگی آموزشی به کار گرفته میشوند.
مثال: اگر عابر در حال عبور باشد اما سرعت او کم باشد، خودرو پیشبینی میکند که آیا عبور او تا زمانی که خودرو برسد کامل میشود یا خیر و بر اساس آن ترمز میگیرد یا ادامه میدهد.
کنترل و اجرای فرمانها (Control Systems)
پس از تصمیمگیری، خودرو باید اعمال فیزیکی مانند گاز دادن، ترمز کردن، پیچیدن و… را به سیستمهای کنترلی خود منتقل کند.
این کار توسط واحد کنترل الکترونیکی (ECU) انجام میشود. این بخش مانند مغز مکانیکی خودروست که دستورهای دیجیتال را به حرکت واقعی تبدیل میکند.
چالشهای خودروهای خودران
با وجود پیشرفتهای فراوان، موانع مهمی هنوز در مسیر خودران شدن کامل خودروها وجود دارد:
پیچیدگی محیطهای واقعی: رانندگی در خیابانهای شلوغ، پیشبینی رفتار غیرمنتظره رانندگان انسانی یا عبور ناگهانی حیوانات کاری دشوار است.
شرایط آبوهوایی: برف یا مه ممکن است حسگرها را دچار اختلال کند.
چالشهای اخلاقی: اگر در موقعیت تصادف اجتنابناپذیر قرار گیرد، اولویت با نجات سرنشین است یا عابر پیاده؟
زیرساخت و قانونگذاری: اکثر کشورها هنوز قوانین مشخصی برای حضور خودروهای بدون راننده در خیابان ندارند.

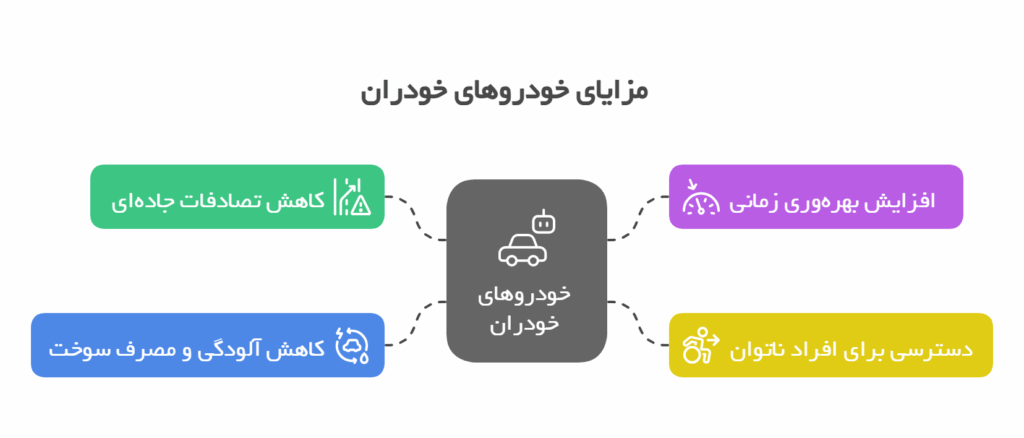
مزایا و کاربردهای خودروهای خودران
از مزایای خودروهای خودران می توان به موارد زیر اشاره کرد:
کاهش تصادفات جادهای: بیش از ۹۰٪ تصادفات به دلیل خطای انسانی است.
افزایش بهرهوری زمانی: مسافران میتوانند در طول مسیر کار یا استراحت کنند.
دسترسی برای افراد ناتوان یا سالمندان: بدون نیاز به راننده یا کمک دیگران میتوانند به مقصد برسند.
کاهش آلودگی و مصرف سوخت: الگوریتمهای هوشمند رانندگی میتوانند در کاهش آلودگی و مصرف سوخت موثر باشند.
وضعیت فعلی و آینده فناوری
در حال حاضر:
- شرکت Waymo ناوگانی از خودروهای بدون راننده در شهرهایی مانند فینیکس دارد.
- Cruise در سانفرانسیسکو خودروهای رباتاکسی را آزمایش میکند.
- تسلا با سیستم Autopilot هنوز در سطح ۲ یا ۳ است، اما به سمت سطح ۴ حرکت میکند.
پیشبینی میشود تا سال ۲۰۳۰ خودروهای خودران در بخشهای خاص (مانند حملونقل بینشهری، یا مناطق شهری محدود) بهطور گسترده مورد استفاده قرار گیرند.
خودروهای خودران نهتنها فناوری جدیدی هستند، بلکه سبک زندگی بشر را نیز تغییر میدهند. از کاهش تصادفات و ترافیک گرفته تا فراهم کردن دسترسی برای افرادی که توانایی رانندگی ندارند، این فناوری پتانسیل دگرگونی جهان حملونقل را دارد.
اما برای رسیدن به آیندهای کاملاً خودران، نیازمند حل چالشهای فنی، اخلاقی و قانونی هستیم. همکاری میان دولتها، شرکتهای فناوری، و مردم در این مسیر ضروری است.
اگرچه هنوز مسیر طولانی در پیش است، اما خودروهای خودران یکی از قطعیترین نشانههای ورود ما به دنیای هوشمندتر، امنتر و کارآمدتر هستند.
سایر مطالب مرتبط:
انقلاب هوش مصنوعی در پزشکی: تحلیلی جامع از کاربردهای عملی، تأثیرات صنعتی و مسیرهای آینده

 چیست و چگونه میتواند تهدیدی برای حقیقت باشد؟")


